试题
试卷
试题
首页
充值中心
开通VIP会员
特惠下载包
激活权益
帮助中心
登录
注册
当前位置:
高中通用技术
/
单选题
1.
(2023·浙江模拟)
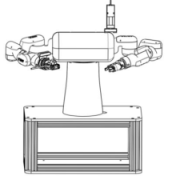
如图所示为国内某科研团队研发的智能核酸检测机器人,装有“视觉与力控”子系统,可以保证刮拭足够的采样面积,刮拭力度可以控制在0.15N以内,降低人体的不适感。在视觉子系统中,视觉传感器获取人脸原始图像并传输到控制器,由控制器对图像数据进行加工,提取口腔、喉咙和扁桃体位置,将结果以信号的方式输送到相连的PLC在力控子系统中,力传感器将获得的受力信息反馈给PLC,PLC将实际力值与目标力值进行比较,发出指令给电机,由电机驱动机械臂调节位置姿态来达到力的目标值,使刮拭动作轻柔。
(1) 从系统的角度分析,下列说法中正确的是( )
A .
控制器的图像处理精度是影响该系统优化的约束条件
B .
当视觉传感器发生故障,会导致机械臂的位置发生偏差,体现了系统的动态性
C .
设计该系统时,既要考虑采样效率,又要考虑刮拭力度,体现了系统分析的综合性原则
D .
能够代替人工完成核酸采样的全过程,体现了系统的整体性
(2) 下列关于力控子系统的分析中,不正确的是( )
A .
视觉传感器是检测装置
B .
输出量是机械臂的实际力值
C .
执行器是电机
D .
控制方式属于闭环控制
微信扫码预览、分享更方便
使用过本题的试卷
浙江省十校联盟2023届高三通用技术第三次联考试卷(2月)