试题
试卷
试题
首页
充值中心
开通VIP会员
特惠下载包
激活权益
帮助中心
登录
注册
当前位置:
高中通用技术
/
综合题
1.
(2017高三上·浙江模拟)
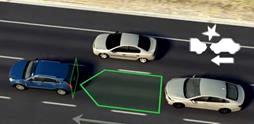
自适应巡航控制(ACC)是通过调整车速以适应交通状况的汽车运行控制。其控制过程为:在车辆行驶过程中,安装在车辆前部的雷达持续扫描车辆前方,通过接收雷达信号检测出与前车的车距,同时轮速传感器采集车速信号,当与前车之间的距离过小或过大时,ACC控制单元通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。请根据示意图和描述,完成以下任务:
(1) 自适应巡航的控制方式属于
(在①开环控制;②闭环控制中选择合适的选项,将序号填写在横线处)
(2) 该系统的执行器和被控对象分别是
和
(在①制动防抱死系统和发动机控制系统;②车轮;③车辆;④前方车辆中选择合适的选项,将序号填写在横线处)
(3) 通过协调制动防抱死系统和发动机控制系统控制车轮转速,使车辆与前方车辆始终保持在设定的安全距离。此“设定的安全距离”属于控制系统的
(在①控制的目标;②控制的条件;③被控量;④控制量中选择合适的选项,将序号填写在横线处)
(4) 为提高该系统的工作效果,以下不属于有效的优化措施是
、
(在①提高车距检测灵敏度与精确度;②增加安全距离;③提高刹车与油门控制的精准度;④增加雷达测速报警装置中选择合适的选项,将序号填写在横线处)。
微信扫码预览、分享更方便
使用过本题的试卷
浙江省2018届高三上学期通用技术选考试题