试题
试卷
试题
首页
充值中心
开通VIP会员
特惠下载包
激活权益
帮助中心
登录
注册
当前位置:
高中通用技术
/
单选题
1.
(2019高三上·温州月考)
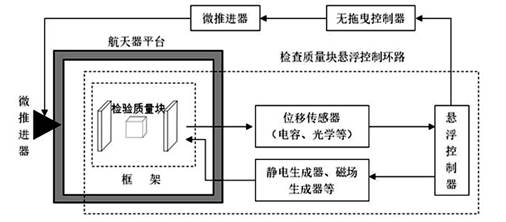
如图所示是无拖曳航天器控制系统,该系统主要由检查质量块悬浮控制环路、无拖曳控制器、微推进器和航天器平台等模块组成,其中检查质量块悬浮控制环路可以保持检验质量 处于框架的中心位置,同时能高精度获取航天器平台和检验质量块之间的位置偏差,并传输 给无拖曳控制器,微推进器产生推力,保证航天器平台以检验质量块为中心。该系统可以减 小航天器受宇宙环境扰动的影响,确保超稳的实验环境。请完成问题。
(1) 从系统的角度分析,下列说法不恰当的是( )
A .
检查质量块悬浮控制环路可以看作是无拖曳航天器系统的一个子系统
B .
微推进器产生的推力大小及方向由航天器平台和检验质量块之间的位置偏差确定,体现了系统的相关性
C .
检查质量块悬浮控制环路可以测量计算航天器和检验质量块之间的位置偏差,并将信息传递给无拖曳控制器,体现了系统分析的科学性原则
D .
宇宙环境属于该系统优化的约束条件
(2) 下列关于无拖曳航天器控制系统说法合理的是 ( )
A .
被控对象是航天器平台,控制量是微推进器产生的推力大小
B .
该控制系统属于自动、开环控制
C .
由于该系统可以抵消太空环境对航天器平台的扰动力,所以太阳光压等宇宙环境因素不属于该系统的干扰因素
D .
研究检验质量块悬浮控制环路时,要逐个分析位移传感器、悬浮控制器等要素的功能,采用了黑箱方法
微信扫码预览、分享更方便
使用过本题的试卷
浙江省温州市普通高中通用技术2019年11月选考适应性出测卷